文摘
有些人只有一个手或根本没有手。他们失踪的手从出生或因事故或疾病。义肢手是人工设备用于替换丢失的手。“被动”的手,意思是假肢手不移动,看起来更真实,光,健壮的,不要太贵。但是,积极把握事情,需要一个“活跃”假肢。这些可以是简单的机械的手或复杂,昂贵的机械手。各种假肢有优点和缺点,但目前的研究大多集中于活跃的电子机械手。一个大的,解决面临的挑战是如何使假肢用户感觉与他们的机械手。许多不同的方法都试过了,有些需要手术,但是科学家们还不能完全恢复自然的感觉。
介绍
并非巧合我们问人们“给我们一只手”,当我们需要帮助。我们的手是至关重要的,从起床到弹钢琴。但有些人只有一个手或任何的手。有些人天生没有一双手。其他人通过意外失去双手,像车祸一样,通过疾病,如血液感染,或在战争中。通常,事情可以很容易地用一只手做(1]。人们可以利用他们的牙齿,下巴,或腿和脚来保存和移动的东西。例如,试图用一只手拉下拉链的夹克,一个人可以使用他们的牙齿的衣领。和任务不容易单手完成的,有用的工具。然而,有两个手使许多任务简单,就像打开一扇门而携带东西。除此之外,我们还用我们的手与他人交流,用手势和指向2]。
什么是手假肢?
一个假肢是一个人工设备,模仿一个身体部位的功能。超过半数的人缺少一个或双手至少选择穿假肢的一些时间1]。大致有两种不同类型:被动假肢,化妆品和被动机械的手,和活跃的假肢,喜欢body-powered和externally-powered手(1,3]。
“被动”假体是什么?
最简单形式的假肢,被动整形假体,已经使用超过2000年前的古埃及(图1一个)。他们提供一个审美目的,这意味着他们主要是“看起来”而不是功能目的和他们被称为“被动”接口,因为他们不能积极把握的东西。被动整容手今天仍在使用,因为他们可以看起来很逼真的,许多人是很重要的。如果我们的社会更能接受或身体,人们会感到更舒适的在公共场合没有化妆品假肢。
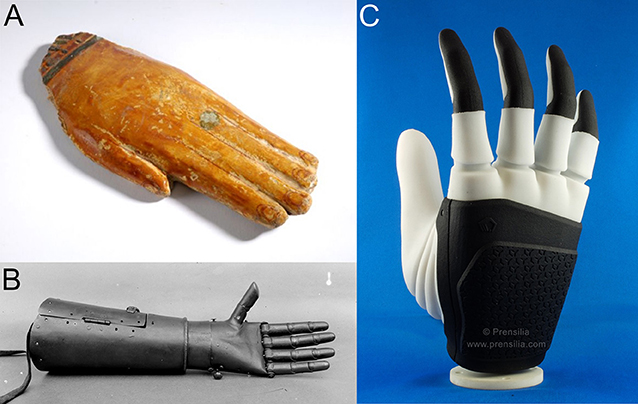
- 图1 -假肢手的进化。
- (一)这是一个古老的木制手从埃及假肢。(B)这个中世纪的手指机械铁手可以被锁定,允许他的马的骑士统治而骑。(C)该肌的手自然一样小而轻的手。它可以单独把拇指和食指,中间,环和小指在一起。(一)BY-NC-SA利兹博物馆和美术馆;(B)CC归因3.0 Unported Generallandesarchiv卡尔斯鲁厄498 - 1 Nr。5110年《图片报》1;(C)复制与许可Prensilia开发。
一个被动的机械手的手指,可移动的另一方面的帮助下或环境。这意味着可以使用机械手的东西。第一个被动机械手是开发和使用的德国骑士戈特弗里德“Gotz”冯Berlichingen在16世纪(图1 b)。
“活跃”假体有什么不同?
活动接口允许用户把握对象,使用特定的运动身体没有另一只手的帮助。有两种类型的活动接口:body-powered externally-powered。
Body-powered假肢,在19世纪发明的,通常是连接到身体利用。末尾的手或钩子是通过身体动作开启和关闭的,像伸出手臂(图2)。这些假体是由塑料、金属、织物带的利用。
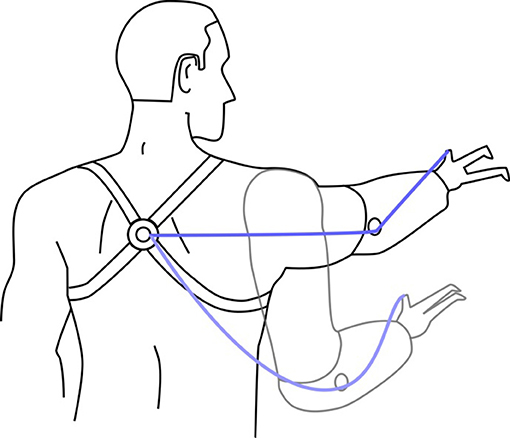
- 图2——大多数body-powered假肢可以打开拉电缆,类似于骑自行车刹车。
- 伸出手臂或舍入的肩膀拉电缆(蓝色),打开了假肢。当手臂拉电缆上的张力释放,一个橡皮筋或弹簧自动关闭假肢。
Externally-powered活跃假肢自1960年代以来已被广泛使用。他们被称为“externally-powered”,因为他们需要一个外部电源,电池。这些类型的假体是复杂的机器人的手和胳膊,有时你看到电影或电脑游戏(图1 c)。这些假体是由塑料,金属,和许多电子元件,如汽车和微处理器。这些设备也被称为“肌电的“假体。“肌”来自希腊,意味着肌肉。当我们将我们的肌肉,小周围产生电场,可以通过测量电极。通过把电极放在皮肤肌肉,我们可以测量如果多少肌肉运动。测量的电信号通过电线发送到假肢。这些“肌”信号告诉假肢是否打开或关闭和移动速度(图3)。
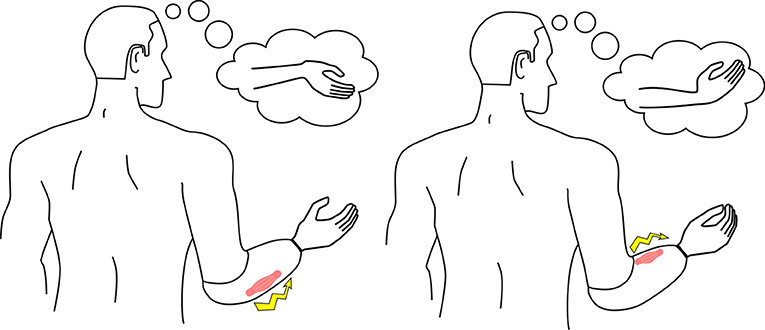
- 图3——当只失踪,手前臂的肌肉用来控制肌假肢。
- 想象弯曲手腕一般打开假肢。想象弯曲手腕向身体然后再关闭义肢。
科学家们正在试图寻找有没有更好的方法来使用这些肌电的信号来控制假肢,如简化控制和使更多的运动不仅仅是打开和关闭,例如,个人移动手指(2]。
最近发展上肢假肢称为“骨整合”(来自拉丁语“操作系统”,即骨)。假在这个过程中,不是被附加到一个套接字树桩,用于其他类型的活跃的假肢。相反,螺钉植入骨头的手臂,和假肢手直接附着在骨通过这些screws-similar自然手(见0:14-1:12 (4])。然而,手术和治疗后患者要求都非常严格。
假肢是最好的?
假体选择部分个人偏好,部分取决于用户的钱花在假肢(3]。Body-powered假肢是昂贵的比整形假体(表1)。肌电的手假体成本更,没有医疗保险,很少有人能买得起。肌电的接口也比其他类型更重,每天和他们的电池需要充电。进一步,肌电的控制需要健康的肌肉和一些培训为了他们正确地运作。Body-powered假肢限制手臂和肩膀的运动范围由于利用但更健壮和允许重拾起和移动对象。整形假体不限制范围的运动,光,和他们通常看起来很真实,但他们不允许用户积极抓住任何东西。一些人喜欢用简单的接口,而不是复杂的机械手,可以打破更容易,很难修复。
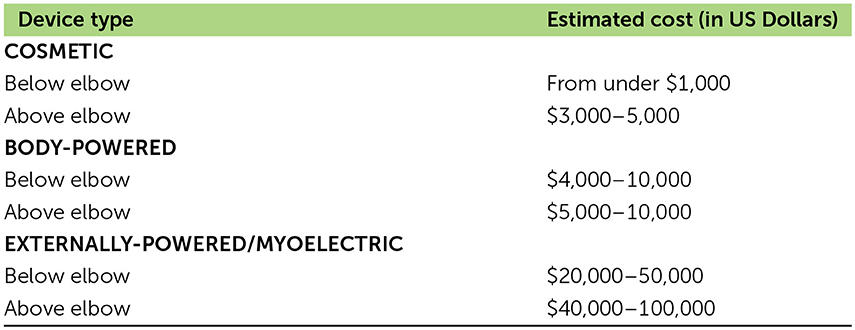
- 表1——估算成本假臂,在美国。不同国家之间强烈的价格可能会有所不同。
现代肌假肢手的手指移动到不同的位置,允许不同的方式把握(见1:28-1:38和2:22-2:59 (4])。这可以简化把握,和更少的“补偿性运动”是必要的。补偿运动是必要的,因为假肢不自然的动作不能像天然的胳膊或手5]。例如,接一些平坦的一张桌子,一个人的手肘穿着简单的假体需要解除侧向来弥补缺失的手腕旋转。现代肌假肢的拇指可以移动到关闭的食指保持平的东西,使它不必要的抬起手肘。最近的研究表示,一个可移动的手腕更有利于减少补偿运动(5]。
因为这些不同的优点和缺点,许多人使用两个或两个以上的假体(1]。
你能感觉到与机器人的手吗?
一个悬而未决的问题是如何用假肢感觉2,6]。人们使用body-powered假肢可以感觉到的紧张有线移动假肢,这样他们就可以抓取力估计。肌电的接口可以安装传感器做事喜欢记录在指尖的把握力,但科学家还不知道如何给用户信息从传感器回假肢。
这个信息”反馈“需要提供以一种有意义的方式。有两种不同的方法来提供反馈:侵入性和非侵入性的6]。都有优点和缺点。
“入侵”意味着prosthesis-user需要手术得到这种反馈。最常见的,植入电极,研究人员,或通过神经在树桩,直接刺激神经系统。其目的是通过直接神经刺激恢复自然反馈。毕竟,自然传感器在人类的手也把他们的信息通过相同的神经到大脑。但该技术尚未成功。
相比之下,“非侵入性”的反馈不需要手术。共同提供非侵入性的方式反馈的电刺激皮肤,振动在皮肤上,或设备推,拉,或挤压皮肤。但是,这通常不是再现自然的感觉。例如,科学家将振动电机在皮肤上;感动,假肢时汽车振动,类似于当一个手机接收一条消息。我们称之为“感官替代”,因为一种感官信息(自然的触觉)取代(“取代”)与另一个(振动)。这替换不是大脑自然会明白,所以需要学习。这将是理想的如果我们可以,相反,非侵入性的方式再现自然的感觉。
结论
假体不是严格必需的日常生活中,但是很多人选择穿某种类型的假体。所有类型的假体可以恢复的出现有两只手,在某种程度上。活跃的假肢可以进一步恢复一些联系的能力,掌握,并持有对象。肌电的手越来越灵巧的英俊,但他们是昂贵的。与这些机器人的手恢复知觉,我们需要找到一种方法来发送信息从传感器到用户以一种有意义的方式。许多研究人员正在研究这个问题,取得了巨大的进展,但是仍然没有手假肢恢复自然的感觉。
术语表
假肢:↑更换一个失踪的身体部位。
人工:↑由人类的东西;不自然。
Body-Powered:↑是人体所感动。
Externally-Powered:↑东西搬到与外部能源,像一个电池。
肌电的:↑使用电能的肌肉(“肌”希腊“肌肉”)。
传感器:↑一种设备,对物理刺激(例如,压力)和发送信息。
反馈(专门为假体):↑假的信息返回给人使用假肢。
利益冲突声明
CC Prensilia Srl持有股份,一家生产机器人的手的图1 c。
其余作者宣称的研究是在没有进行任何商业或财务关系可能被视为一个潜在的利益冲突。
引用
[1]↑Ostlie, K。,Lesjø, I. M., Franklin, R. J., Garfelt, B., Skjeldal, O. H., and Magnus, P. 2012. Prosthesis use in adult acquired major upper-limb amputees: patterns of wear, prosthetic skills and the actual use of prostheses in activities of daily life.Disabil。Rehabil。协助。抛光工艺。(2012)7:479 - 93。doi: 10.3109 / 17483107.2011.653296
[2]↑Cordella F。,Ciancio, A. L., Sacchetti, R., Davalli, A., Cutti, A. G., Guglielmelli, E., et al. 2016. Literature review on needs of upper limb prosthesis users.前面。>。10:1-14。doi: 10.3389 / fnins.2016.00209
[3]↑凯里,s . L。,Lura, D. J., and Highsmith, M. J. 2015. Differences in myoelectric and body-powered upper-limb prostheses: systematic literature review.j . Rehabil。研究开发。52:247 - 62。doi: 10.1682 / JRRD.2014.08.0192
[4]↑DeTOP。2018年。DeTOP项目官方视频。YouTube.com。网上:https://www.youtube.com/watch?v=6WQiJPexEDM(2019年4月6日通过)。
[5]↑Montagnani F。,Controzzi, M., and Cipriani, C. 2015. Is it finger or wrist dexterity that is missing in current hand prostheses?IEEE反式。神经系统。Rehabil。Eng。21:1-10。doi: 10.1109 / TNSRE.2015.2398112
[6]↑斯科菲尔德,j·S。埃文斯,k . R。凯里,j . P。,和Hebert, J. S. 2014. Applications of sensory feedback in motorized upper extremity prosthesis: a review.专家启地中海。开发。13:1-13。doi: 10.1586 / 17434440.2014.929496